PROJECTIONS D'IMAGES PANORAMIQUES
Une projection d'image se produit chaque fois qu'une image plate est mappée sur une surface courbe, ou vice versa, et est particulièrement courante en photographie panoramique. Une projection est effectuée lorsqu'un cartographe cartographie un globe terrestre sphérique sur une feuille de papier plate, par exemple. Puisque l'ensemble du champ de vision qui nous entoure peut être considéré comme la surface d'une sphère (pour tous les angles de vue), une projection sphérique similaire à la projection 2D est requise pour les photographies qui doivent être imprimées.
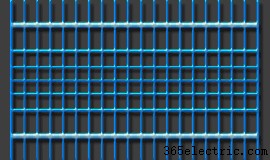
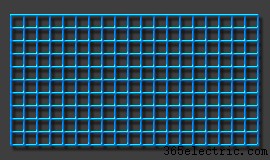
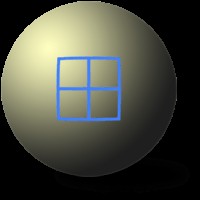 Angle de vue étroit
Angle de vue étroit (la grille reste presque carrée)
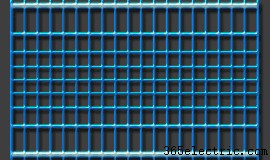
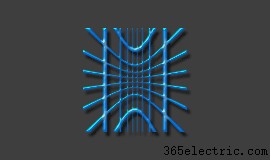
 Angle de vue plus large
Angle de vue plus large (la grille est très déformée)
Pour les petits angles de vision, il est relativement facile de déformer cela en une image sur une feuille de papier plate puisque cet arc de vision est relativement plat. Une certaine distorsion est inévitable lorsque vous essayez de mapper une image sphérique sur une surface plane. Par conséquent, chaque type de projection essaie uniquement de minimiser un type de distorsion au détriment des autres. Au fur et à mesure que l'angle de vision augmente, l'arc de vision devient plus incurvé, et ainsi la différence entre les types de projection panoramique devient plus prononcée. Quand utiliser chaque projection dépend en grande partie du sujet et de l'application ; nous nous concentrons ici sur quelques-uns qui sont les plus couramment rencontrés en photographie numérique. De nombreux types de projection abordés dans ce didacticiel peuvent être sélectionnés comme format de sortie pour plusieurs progiciels panoramiques ; PTAssembler permet de sélectionner tous ceux qui sont listés.
TYPES DE PROJECTION D'IMAGES EN PHOTOGRAPHIE
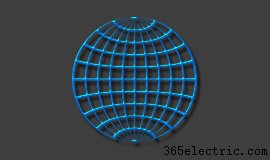
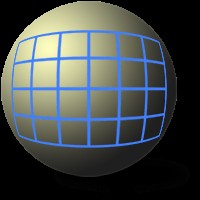
 Grille représentant la sphère de vision
Grille représentant la sphère de vision(si debout au centre)

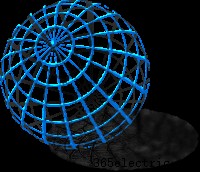
 Type de projection pour une sphère aplatie :
Type de projection pour une sphère aplatie :| Équirectangulaire (100 % de couverture) | |
| Rectiligne | Cylindrique |
| Mercator | Fisheye |
| Sinusoïdal | Stéréographique |
Si tous les types de projection d'image ci-dessus semblent un peu intimidants, essayez d'abord de lire et de comprendre la distinction entre rectiligne et cylindrique (en gras), car ce sont ceux qui sont les plus largement utilisés lors de l'assemblage de photos de panoramas numériques.
Équirectangulaire les projections d'image mappent les coordonnées de latitude et de longitude d'un globe sphérique directement sur les coordonnées horizontales et verticales d'une grille, où cette grille est environ deux fois plus large que haute. L'étirement horizontal augmente donc plus loin des pôles, les pôles nord et sud étant étirés sur l'ensemble des bords supérieur et inférieur de la grille aplatie. Les projections équirectangulaires peuvent montrer tout l'angle de vue vertical et horizontal jusqu'à 360 degrés.
Cylindrique les projections d'image sont similaires à l'équirectangulaire, sauf qu'elles étirent également verticalement les objets à mesure qu'ils se rapprochent des pôles nord et sud, avec un étirement vertical infini se produisant aux pôles (par conséquent, aucune ligne horizontale n'est affichée en haut et en bas de cette grille aplatie). C'est pour cette raison que les projections cylindriques ne conviennent pas non plus aux images avec un très grand angle de vue vertical. Les projections cylindriques sont également le type standard rendu par les caméras panoramiques traditionnelles avec un objectif pivotant. Les projections cylindriques conservent des tailles relatives d'objets plus précises que les projections rectilignes, mais cela se fait au détriment du rendu des lignes parallèles à la ligne de visée du spectateur comme étant courbes (même si elles apparaîtraient autrement droites).
Rectilinéaire les projections d'image ont le principal avantage de mapper toutes les lignes droites dans l'espace tridimensionnel en lignes droites sur la grille bidimensionnelle aplatie. Ce type de projection est ce que la plupart des objectifs grand angle ordinaires visent à produire, c'est donc peut-être la projection avec laquelle nous sommes le plus familiers. Son principal inconvénient est qu'il peut considérablement exagérer la perspective à mesure que l'angle de vue augmente, ce qui fait que les objets apparaissent de travers sur les bords du cadre. C'est pour cette raison que les projections rectilignes ne sont généralement pas recommandées pour des angles de vue bien supérieurs à 120 degrés.
Fisheye les projections d'image visent à créer une grille aplatie où la distance du centre de cette grille est à peu près proportionnelle à l'angle de vision réel, produisant une image qui ressemblerait à la réflexion d'une sphère métallique. Ceux-ci ne sont généralement pas utilisés comme format de sortie pour la photographie panoramique, mais peuvent à la place représenter les images d'entrée lorsque le type d'objectif de l'appareil photo utilisé pour l'assemblage de photos est un objectif fisheye. Les projections fisheye sont également limitées à des angles de vue verticaux et horizontaux de 180 degrés ou moins, produisant une image qui s'inscrit dans un cercle. Cela se caractériserait par des lignes (sinon droites) devenant progressivement plus incurvées à mesure qu'elles s'éloignent du centre de la grille d'image. Un appareil photo avec un objectif fisheye est extrêmement utile lors de la création de panoramas qui englobent toute la sphère de vision, car ceux-ci ne nécessitent souvent que quelques photos d'assemblage.
Mercator les projections d'image sont plus étroitement liées aux types de projection cylindrique et équirectangulaire; mercator représente un compromis entre ces deux types, offrant moins d'étirement vertical et un plus grand angle de vue vertical utilisable que cylindrique, mais avec plus de courbure de ligne. Cette projection est peut-être la plus reconnaissable de son utilisation dans les cartes plates de la terre. Notons ici aussi qu'une forme alternative de cette projection (le mercator transversal) peut être utilisée pour des panoramas verticaux de grande hauteur.
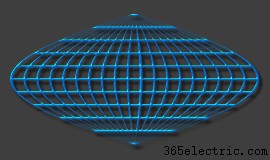
Sinusoïdal les projections d'image visent à maintenir des zones égales dans toutes les sections de la grille. Si l'on aplatit le globe d'une terre, on peut imaginer que cette projection pourrait être enroulée à nouveau pour former une sphère avec la même surface et la même forme que l'original. La caractéristique de surface égale est utile car si vous enregistrez une image sphérique en 2D, elle conserve la même résolution horizontale et verticale sur toute l'image. Cette projection est similaire aux types fisheye et stéréographique, sauf qu'elle maintient des lignes de latitude parfaitement horizontales à partir de la sphère d'origine.
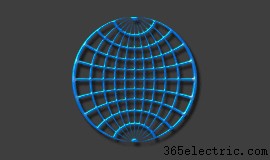
Stéréographique Les projections d'images sont très similaires aux projections fisheye, sauf qu'elles conservent un meilleur sens de la perspective en éloignant progressivement les objets du point de vue. Cette caractéristique d'exagération de la perspective est quelque peu similaire à celle donnée par la projection rectiligne, quoique certainement moins prononcée.
EXEMPLES :GRAND CHAMP DE VISION HORIZONTAL
Comment les projections d'images ci-dessus influencent-elles réellement une photographie panoramique ? La série de photographies suivante permet de visualiser la différence entre deux types de projection les plus souvent rencontrés dans les logiciels d'assemblage de photos :les projections rectilignes et cylindriques. Ceux-ci sont conçus pour montrer uniquement les différences de distorsion pour un grand angle de vue horizontal; les panoramas verticaux sont utilisés plus tard pour illustrer les différences de distorsion verticale entre les autres types de projection.
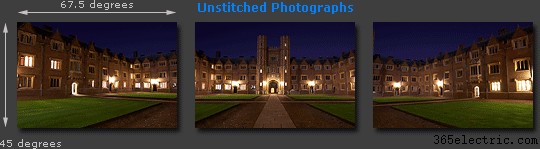
Le premier exemple montre comment une projection d'image rectiligne serait rendue dans un assemblage de photos des trois photographies ci-dessus.
Notez l'extrême distorsion près des bords de l'angle de vue, en plus de la perte dramatique de résolution due à l'étirement de l'image. L'image suivante montre à quoi ressemblerait l'image fortement déformée ci-dessus si elle était recadrée pour ne contenir qu'un angle de vue horizontal de 120 degrés.
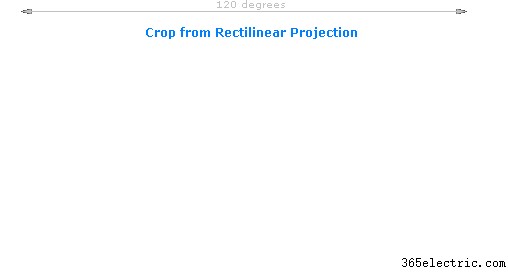
Ici, nous voyons que cette projection rectiligne recadrée donne un aspect très approprié, puisque toutes les lignes architecturales droites sont rendues droites dans la photographie assemblée. D'autre part, cela se fait au détriment du maintien de la taille relative des objets sur tout l'angle de vue ; les objets vers le bord de l'angle de vue (extrême gauche et droite) sont considérablement agrandis par rapport à ceux du centre (tour avec porte à la base).
L'exemple suivant montre comment les photographies assemblées apparaîtraient en utilisant une projection cylindrique. Les projections cylindriques ont également l'avantage de produire des photographies assemblées avec une résolution relativement uniforme et nécessitent également un recadrage minimal de l'espace vide. De plus, la différence entre cylindrique et équirectangulaire est négligeable pour les photographies qui n'ont pas d'angles de vue verticaux extrêmes (comme dans l'exemple ci-dessous).


EXEMPLES :GRAND CHAMP DE VISION VERTICAL
Les exemples suivants illustrent la différence entre les types de projection pour un panorama vertical (avec un très grand champ de vision vertical). Cela permet de visualiser la différence entre les projections équirectangulaire, cylindrique et mercator, même si celles-ci auraient semblé identiques dans l'exemple précédent (avec un angle de vue horizontal large).

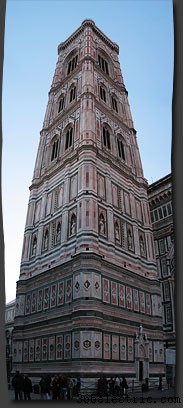
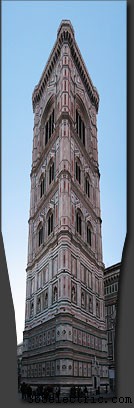 Cylindrique
Cylindrique  Mercator
Mercator  Équirectangulaire
Équirectangulaire Remarque :la compression verticale augmente de gauche à droite. Le point de perspective a été défini comme la base de la tour, donc l'angle de vue vertical effectif donne l'impression qu'il y avait un champ de vision de 140 degrés au total (si le point de perspective était à mi-hauteur).

Ce grand angle de vue vertical nous permet de voir clairement comment chacune de ces projections d'image diffère dans son degré d'étirement/compression vertical. La projection équirectangulaire comprime tellement la perspective verticale que l'on perd sans doute le sens de la hauteur extrême que cette tour donne en personne. Pour cette raison, l'équirectangulaire n'est recommandé qu'en cas d'absolue nécessité (comme dans les photographies assemblées avec un champ de vision vertical et horizontal extrême).
Les trois projections ci-dessus visent à maintenir des lignes verticales presque droites; la projection transversale de Mercator vers la droite sacrifie une certaine courbure pour une perspective (subjectivement) plus réaliste. Ce type de projection est souvent utilisé pour les panoramas avec des angles de vue verticaux extrêmes. Notez également comment cette projection imite étroitement l'apparence de chacune des photographies source individuelles.
La différence entre rectiligne et cylindrique est à peine perceptible pour cet angle de vue horizontal étroit, de sorte que la projection rectiligne n'a pas été incluse.
CALCULATEURS DE CHAMP DE VISION PANORAMIQUE
Le calculateur suivant peut être utilisé pour estimer les angles de vue verticaux et horizontaux de votre appareil photo pour différentes focales d'objectif, ce qui peut aider à déterminer le type de projection le plus approprié.
Remarque :les calculatrices ne sont pas destinées à être utilisées en macrophotographie extrême. Les résultats ci-dessus ne sont qu'approximatifs, car l'angle de vue est en fait également influencé (dans une moindre mesure) par la distance de mise au point. De plus, l'estimation du champ de vision suppose que l'objectif effectue une projection d'image rectiligne parfaite ; les objectifs avec une grande distorsion en barillet ou en coussinet peuvent donner des résultats légèrement différents.
Le calculateur suivant estime le nombre de photos nécessaires pour englober un champ de vision horizontal de 360 degrés, compte tenu des paramètres d'entrée suivants :distance focale, orientation de l'appareil photo, chevauchement des photos et taille du capteur de l'appareil photo numérique.
Remarque :CF =crop factor, qui décrit la largeur relative du capteur de l'appareil photo par rapport à un appareil photo 35 mm. Pour une lecture de fond, veuillez consulter le didacticiel sur les tailles de capteur d'appareil photo numérique.
Pour savoir quand envisager chaque type de projection, veuillez consulter le tableau ci-dessous :
| Type de projection | Recommandations sur le champ de vision | Lignes droites ? | ||
|---|---|---|---|---|
| Horizontale | Vertical | Horizontale | Vertical | |
| Rectiligne | <120° | <120° | OUI | OUI |
| Cylindrique | ~120-360° | <120° | NON | OUI |
| Mercator | ~120-360° | <150° | NON | OUI |
| Équirectangulaire | ~120-360° | 120-180° | NON | OUI |
| Fisheye | <180° | <180° | NON | NON |
Remarque :Toutes les considérations relatives aux lignes droites excluent les lignes horizontales et verticales les plus centrales, et les champs de vision supposent que le point de perspective est situé au centre de cet angle.
Pour une lecture en arrière-plan sur création de panoramas numériques, veuillez également vous reporter à :
Partie 1 :Panoramas numériques d'assemblage de photos
Partie 2 : Utilisation du logiciel d'assemblage de photos